Introduction
Learning can be defined and understood as the processes that
allow animals to detect systematic relations among events in their world.
For example, events are often correlated because of the causal relations among
them. Thunder consistently follows lightning and the expectation of
hearing thunder that occurs when one sees a flash of lightning is an example of
classical conditioning - the well-studied and ubiquitous learning process that
allows animals to detect systematic relations among the occurrence of two
(or more) kinds of events. Another very well-studied kind of systematic
relation among events is the fact that particular behaviors are reliably
followed by particular events, usually because the behavior is the cause of the
event. For example, a rat for whom food is programmed to reliably follow
the pressing of a lever in a Skinner Box soon learns to press the lever.
This learning about the systematic relation between one's own behavior and its
outcomes, of course, is instrumental conditioning. These forms of
associative learning have been described as the means by which the nervous
system detects systematic patterns in the relations among event occurrences
(e.g., Dickinson, 1980).
But relations among the occurrence of events is not the only
sort of relations among events that exist. At least three other kinds of
relations among events have been shown to support learning.
If there is a sequential relationship among events presented in
a series, animals come to be controlled by that relationship. For example,
if a rat is presented with a series of trials in which the number of pellets
provided as reinforcement systematically increases (or decreases) over the trial
series, running speed systematically increases (or decreases) over the trial
series (e.g., Capaldi, Blitzer, & Molina, 1979; Hulse & Dorsky, 1980). It
has been argued that this control is produced by a learning process that
represents the sequential relationship among the events, in this case by representing the
systematic increase (or decrease) in reward magnitude (Hulse, 1978).
Learning processes that are sensitive to temporal relations
among events have received a great deal of experimental and theoretical
attention. The study of animals exposed to events that are systematically
separated in time by intervals on the order of seconds to minutes has led to
well developed theories of learning systems specialized for learning about the
temporal relations among events (see Church, 2002 for a review).
|
Table A-1: Proposed Relational Learning Processes |
|
Learning Process |
Type of Relation |
Example |
| |
|
|
|
Classical Conditioning |
Correlation Among Event Occurrences |
One event (e.g., bell) consistently followed by a second
event (e.g., food)
→ |
|
Instrumental Conditioning |
Correlation Between Behavior and Event |
Behavior (e.g., lever press) consistently followed by
event (e.g., food pellet) |
|
Serial Learning |
Ordered Change in Event Property |
Increase in Reinforcement Magnitude Over Trials |
|
Interval Timing |
Systematic Temporal Interval Between Events |
Reinforcement Available on a Fixed Interval Schedule |
|
Spatial Pattern Learning |
Systematic Spatial Relations Among Events |
Reinforcement Arranged in a Consistent Spatial Pattern |
This cyberchapter is about the means and mechanisms by which
spatial
relations are learned. The focus is on a series of
experiments that attempt to isolate spatial relations the target
of learning.
Two illustrations of Pole Box apparatus used in our
spatial pattern learning experiments are shown below. Poles are
equally spaced, with separations in different versions of the apparatus ranging
from 12 cm to 21 cm. The poles are arranged in a matrix - we have used
apparatus with 4 X 4, 5 X 5, and 4 X 5 matrixes of poles. There is a
well on top of each pole, in which a pellet (or other small food item) can be
hidden. In the critical conditions of our experiments, the location of
the baited poles varies unpredictable from trial to trial. However, the
baited poles form a consistent spatial pattern over trials.
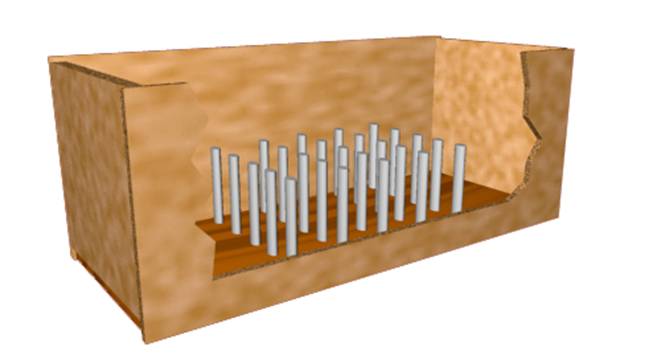 |
Figure A-1:
Drawing of 5 X 5 Pole Box apparatus (front wall cutaway for
illustration purposes (Drawing by Morgan Terrinoni) |
 |
Figure A-2:
Photograph of 5 X Pole box apparatus |
Figure A-3 shows one exemplar of each of three spatial
patterns for which we have evidence of behavioral control and, by inference, of
spatial pattern learning. Spatial pattern learning can be contrasted
with other forms of spatial learning that have been described, as outlined in
Part II of this cyberchapter. The evidence for
control by the square (top panel), line (middle panel), and checkerboard (bottom
panel) patterns is reviewed in Part III.
 |
Figure A-3:
Exemplars of three spatial patterns used in experiments with the
poles box (Top: one of 16 possible exemplars of the square pattern;
Middle: one of eight possible exemplars of the line patterns;
Bottom: one of two possible exemplars of the checkerboard pattern) |